|
Author: Vinita Singhal, Altera Corp.
Source: EDN - European Edition, 20 Jan 1992, pages 115-122 physical
HTMLized by Louis Ohland. Edited by Tomáš Slavotínek.
The Micro Channel Architecture defines a high-speed data-transfer
protocol for moving data between a bus master and a slave. Implementing this
protocol in programmable logic gives you design flexibility in addition to
high-speed data transfers.
Recent enhancements to the Micro Channel Architecture bus have created a
system that supports independent bus masters. One of the main enhancements is
the streaming-data procedure (SDP), which allows faster data transfer.
Implementing this protocol needn't greatly complicate your design. You can
generate essential signals for a bus-master adapter with SDP capability using
an EPLD-based design. (Check the EDN BBS for an Altera Hardware Description
Language state-machine description of this circuit.)
Streaming is a high-speed data-transfer mode for data (bytes, words, or
double words) that reside at consecutive address locations. An SDP cycle needs
only the starting address; the protocol assumes subsequent data packets are at
sequential addresses. One streaming-data cycle consists of multiple 16-, 32-,
or 64-bit sequential data transfers. The cycle time for each packet transfer is
half (100 nsec) that of the default (zero-wait-state, 200-nsec) cycle. The
streaming-data procedure is transparent to devices that do not use or transmit
the data. Streaming-data participants must support basic transfer to operate
with non-streaming-data participants.
The SDP increases data-transfer rates by a factor of 2, 4, or even 8 over
the 5 Mbyte/sec baseline bus throughput (which assumes 8-bit transfers). Any
bit in the POS (programmable-option-select) register space can enable SDP. Data
streaming can occur only by mutual consent between a master and a slave device
and requires several signals. These signals are:
| Signal |
Description |
Remarks |
| -SDR(0) |
Streaming-data request bit 0 |
Input to MCA_BM EPLD |
| -SDR(1) |
Streaming-data request bit 1 |
Input to MCA_BM_EPLD |
| -MSDR |
Multiplexed streaming-data request |
64-bit SDP using address + data buses |
| -SD STROBE |
Streaming-data strobe |
MCA_BM EPLD output |
| CD CHRDY |
Card channel ready |
From slave adapter to MCA bus |
| CHRDYRTN |
Card channel ready return |
Input to MCA_BM_EPLD (generated by system as logical AND of all adapter CD CHRDY signals) |
| -CD DS 16 |
Card acknowledge |
16-bit data stream |
| -CD DS 32 |
Card acknowledge |
32-bit data stream |
The following streaming-data-signal combinations (X is "Don't Care") are valid:
| -SDR0 |
-SDR1 |
-CD DS 16 |
-CD DS 32 |
-MSDR |
Description |
| 0 |
0 |
X |
X |
X |
Reserved |
| 0 |
1 |
0 |
0 |
0 |
64-bit SDP |
| 0 |
1 |
0 |
0 |
1 |
32-bit SDP |
| 0 |
1 |
0 |
1 |
1 |
16-bit SDP |
| 1 |
0 |
X |
X |
X |
Reserved |
| 1 |
1 |
X |
X |
X |
Basic transfer |
Although the Micro Channel Architecture specification permits data transfers
between unequal bus widths, it does not direct unequal bit-width data through
the data-byte lanes during the SDP; the master or slave must implement this
control. In general, the wider side of the transfer controls where the data end
up. For example, in the case of a 16-bit master executing streaming-data
transfers with a 32-bit slave, the slave provides steering control.
Five Signals Control the Bus
Once a bus master gains control of the bus, it drives all bus-control
signals and the address and data buses. On the Micro Channel Architecture bus,
a bus master must drive five bus-control signals. These signals are the -S0 and
-S1 status signals; the -ADL address decode latch; the -CMD command strobe; and
the M/-IO memory or I/O-cycle indicator.
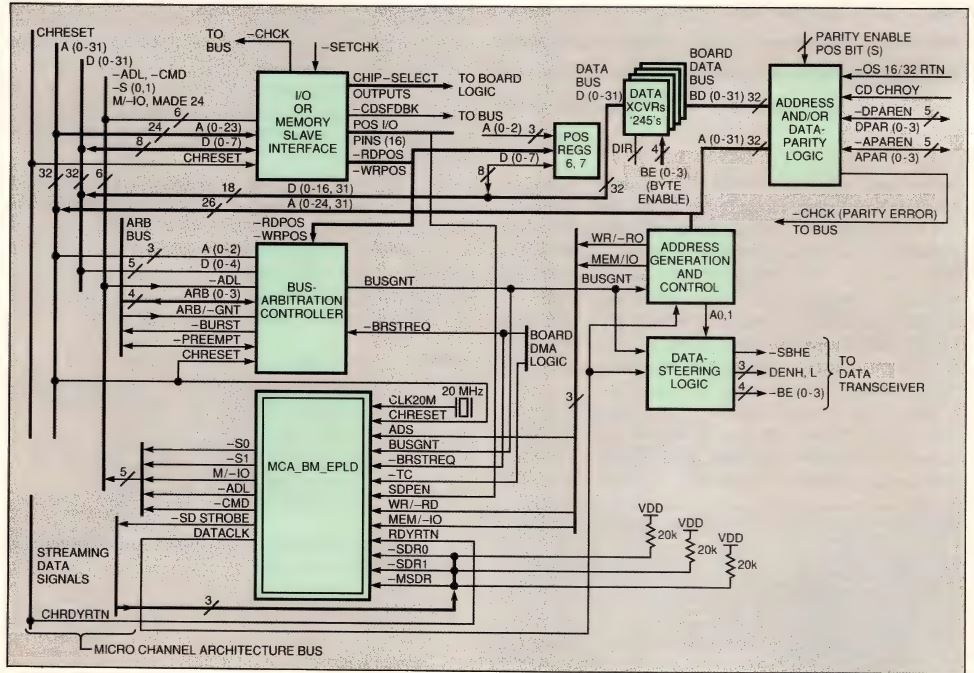
Fig 1: The Micro Channel Architecture bus interface uses
three major functional blocks. These blocks are the memory/IO slave interface,
an arbitration-controller block, and the MCA_BM_EPLD.
Fig 1 illustrates a complete interface to the Micro Channel
Architecture bus using three major functional blocks: An I/O or memory slave
interface, an arbitration-controller block (both available from Altera and
several other sources), and the MCA_BM_EPLD (Altera's Micro Channel
Architecture Bus Master Erasable Programmable Logic Device), which implements
bus-master control logic having SDP capability.
When the arbitration controller signals to the MCA_BM_EPLD, using -BUSGNT,
that the EPLD has won the bus, the EPLD drives the bus-control signals. If you
enable streaming-data capability (via a POS register bit), the MCA_BM_EPLD
determines whether the slave can perform streaming operations. If so, the
MCA_BM_EPLD generates the -SD STROBE (streaming-data strobe) signal. If the
slave introduces wait states (CD CHRDY=low), -SD STROBE continues to strobe;
however, the master maintains data on the bus until the slave activates CD
CHRDY.
The MCA_BM_EPLD is a synchronous state machine that runs off a 20-MHz clock
(CLK_20) and generates the signals necessary for a bus master with
streaming-data-transfer capability. These signals are:
| Signal |
I/O |
Description |
| -ADL |
O |
MCA address-decode latch |
| -CMD |
O |
MCA command strobe |
| -S0 |
O |
MCA status signal bit 0 |
| -S1 |
O |
MCA status signal bit 1 |
| M/-IO |
O |
MCA memory I/O signal |
| -SD STROBE |
O |
MCA streaming-data strobe |
| DATA_CLK |
O |
Master internal clock, to board logic |
| -ADS |
I |
Address stable. from CPU, controller or address-generator logic |
| BUSGNT |
I |
Bus arbitration controller output, signals bus won |
| -BRSTREQ |
I |
Board logic, burst request |
| -TC |
I |
Board logic/MCA, terminal count |
| CHRESET |
I |
MCA channel reset |
| CLK_20M |
I |
20-MHz synchronizing clock |
| WR/-RD |
I |
Write/read from CPU/controller or address-generator logic |
| MEM/-IO |
I |
Memory or I/O cycle, generated by CPU, DMA controller or address generator |
| -SDR0 |
I |
MCA streaming-data request bit 0 |
| -SDR1 |
I |
MCA streaming-data request bit 1 |
| -MSDR |
I |
MCA multiplexed SDR (64-bit streaming-data transfers) |
| RDYRTN |
I |
MCA CD CHRDYRTN |
| SDPEN |
I |
From any user-defined POS bit |
Within an SDP cycle, the -SD STROBE clock times each transfer. SDP cycles
are of several types that depend on the conditions under which the SDP
commences and whether the slave introduces wait states. These types are
deferred cycle, where the SDP start is delayed; data pacing, where wait states
are inserted in SDP cycles; and combined deferred cycle and data pacing.
Additional SDP qualification depends on how the cycle is terminated.
Termination can be requested by the master, the slave, or by the master because
the slave isn't ready. The MCA_BM_EPLD supports all variations of the SDP
cycles.
The MCA_BM_EPLD's outputs are decoded as a function of the present state.
The next state results from the present state and the inputs. The main states
of the MCA_BM_EPLD state machine (Fig 2) are:
| State |
Description |
| IDLE |
Idle, wait for cycle start |
| STATUS |
Cycle start, drive status signals |
| ADLTCH |
Generate address-decode latch |
| BXFER |
Distinguish the cycle to be non-streaming |
| WAIT |
Determine synchronous or asynchronous extended |
| CMDCLK1 |
Default cycle timing state |
| SYNEXT |
Synchronous-extended cycle |
| SYNEXT1 |
Synchronous-extended cycle timing state |
| ASYNEXT |
Asynchronous-extended cycle |
| SDDEFCYC |
Deferred start for SD cycle |
| SD STROBE |
Streaming-data strobe (active low) |
| STRBHI |
Streaming-data strobe (high) |
| MTERM |
Master-terminated SD cycle |
| STERM |
Slave-terminated SD cycle |
| MSTERM |
Master-terminated SD cycle, slave not ready |
| MSTRBHI |
Streaming-data strobe (high, slave not ready) |
| CMDTR1 |
Trailing edge of -CMD |
| EBC |
End of basic transfer cycle |
| ESDC |
End of streaming-data-transfer cycle |
Several details of the state-transition diagram in Fig 2 are worth
emphasizing. The signals -BUSGNT and -BRSTREQ tell the MCA_BM_EPLD when it is
the bus master for block (burst) transfers. -BUSGNT is an output from the Micro
Channel Architecture bus-arbitration controller logic, signaling that the EPLD
has won the bus. The -BRSTREQ input to the arbitration controller indicates an
active -BURST transfer request.
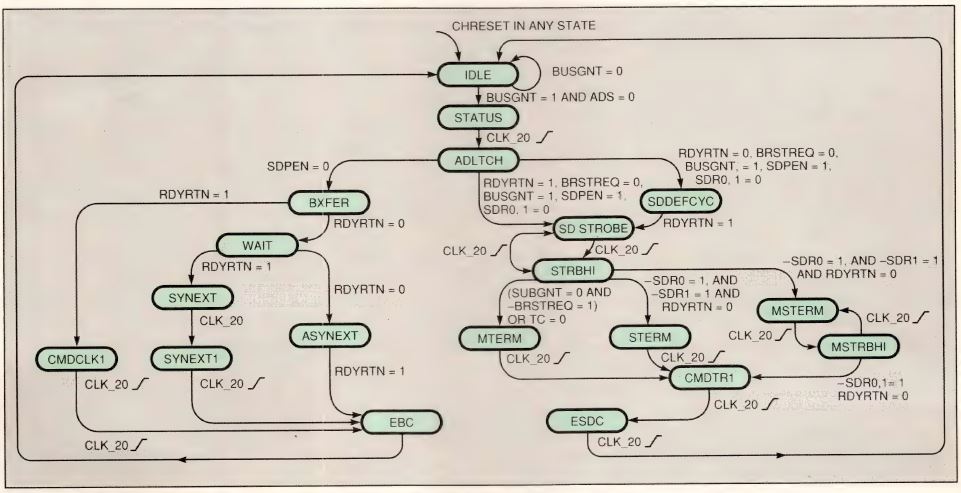
Fig 2: The bus-master state machine contains 19 states that
perform streaming- and nonstreaming-data transfers.
-ADS Starts the Transfer Cycle
The -ADS input to the EPLD (Fig 1) indicates a valid address on the
address bus. Functionally, -ADS is similar to the -ADS signal on the 80386
processor. This signal indicates the start of a data-transfer cycle and the
MCA_BM_EPLD device uses it to latch the state of the WR/-RD and MEM/-IO
signals. Subsequently, the MCA_BM_EPLD drives the status and control signals.
The EPLD decodes the status signals (-S0 and -S1) and M/-IO from the state of
the write/read signal (WR/-RD) and MEM/-IO inputs, respectively. One cautionary
note, the Micro Channel Architecture bus doesn't provide pullup resistors for
the streaming-data-related signals (-SDR0, -SDR1, -MSDR, and -SD STROBE). As a
result, adapters that receive these signals must provide pullup resistors for
each signal. The Micro Channel Architecture specification recommends a minimum
of 20-kΩ pullup to 5V dc.
The DATA_CLK output on the MCA_BM_EPLD device provides stretched-out -SD
STROBE pulses by tracking the status of the CHRDYRTN signal. The address and
byte-count increment logic can use DATA_CLK directly. However, when -MSDR is
low, indicating 64-bit data streaming, the Micro Channel Architecture
specification (and hence, the MCA_BM_EPLD) does not support data pacing. In
this case, the DATA_CLK output is identical to the -SD STROBE output.
The bus-master transfer controller indicates termination of the SDP cycle to
the MCA_BM_EPLD de-vice by either of two conditions. One condition is the
deactivation of BUSGNT followed by deactivation of the -BRSTREQ signal. If the
master is -PREEMPTed or no longer needs the bus, the bus-arbitration controller
deactivates BUSGNT. If another device
-PREEMPTs the bus master, the adapter has up to 7.8 µsec to complete
transfers. Under -PREEMPTion, the arbitration controller de-asserts BUSGNT but
may continue to assert -BURST on the Micro Channel bus. You can use the falling
edge of BUSGNT to start a 7.8-µsec timer to monitor the requesting
device's de-assertion of its bus request (-BRSTREQ). To maximize bus
throughput, the MCA_BM_EPLD uses BUSGNT inactive and -BRSTREQ inactive to
terminate the cycle. The second termination condition is an active low pulse on
the -TC input pin. The local-transfer controller generates this active-low,
terminal-count signal to indicate the last streaming-data-transfer cycle.
According to the Micro Channel specification, a slave that introduces wait
states during SDP should not de-assert -SDR0 and -SDR1 while CD CHRDY is
inactive. Following an active CD CHRDY, the slave may de-assert the -SDR0 and
-SDR1 signals. This restriction leads to the "Master-terminated,
slave-not-ready" special case of a master-terminated streaming-data cycle.
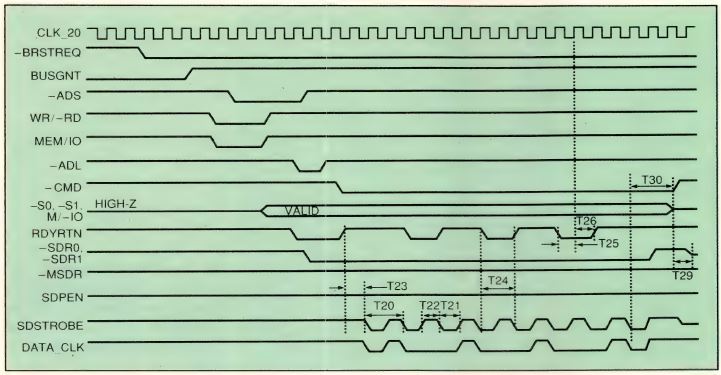
Fig 3: This diagram illustrates the timing of a 16- to 32-bit
streaming-data transfer, with deferred start and data
pacing, terminated by the slave.
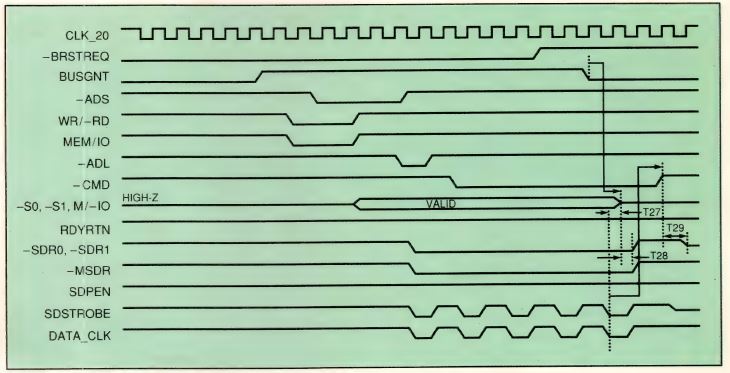
Fig 4: The bus master forcing -BRSTREQ high terminates a
streaming-data transfer.
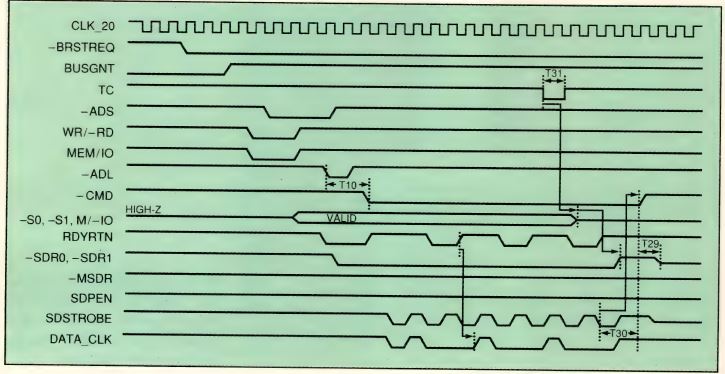
Fig 5: When the master terminates a bus request, if the slave
is not ready, the master continues to generate -SD STROBE
until the slave is ready.
The timing diagrams in Fig 3, 4, and 5 illustrate the bus
cycles the chip supports along with all relevant timing parameters. Several of
these timing parameters are dictated by the Micro Channel specification. They
are not specific to the MCA_BM_EPLD; their inclusion makes the interface timing
description complete and easy to understand. For cross-referencing, Table 1
contains the Micro Channel Architecture streaming-data timing parameter
numbers.
Fig 3, 4, and 5 illustrate timing parameters for SDP cycles.
For a deferred SDP cycle, the Micro Channel Architecture specification does not
have a maximum number (minimum specification=0 µsec) for the first active
-SD STROBE pulse after CHRDYRTN becomes active. The timing of -SD STROBE after
CHRDYRTN is MCA_BM_EPLD's T23 (Fig 3). T24 refers to a Micro Channel
Architecture specification that the slave wait-state logic must adhere to for
CHRDYRTN timing. Timing parameters T25 and T26 specify setup and hold times for
the slave wait-state logic for data-pacing, that is, introducing wait states
during SDP cycles.
In a slave-terminated SDP cycle, the slave indicates the end of the SDP
transfer by de-asserting -SDR0, -SDR1, and -MSDR. In response, the bus master
de-asserts status signals -S0 and -S1 and the -CMD strobe. MCA_BM_EPLD's T30
timing parameter adheres to the Micro Channel Architecture specification
stating that -CMD inactive from the last falling edge of -SD STROBE should be
100 nsec minimum. T30 also applies to the case when the master terminates the
cycle but the slave is not ready, which is illustrated in Fig 5.
In a master-terminated SDP cycle (Fig 4), the SDP transfer ends when
the master deactivates -S0 and -S1. T27 refers to a Micro Channel Architecture
specification that states -S0 and -S1 should be de-asserted within 10
µsec of the last -SD STROBE pulse. This parameter makes it necessary for
the transfer controller on the bus-master adapter to signal the end of SDP
transfer (by de-asserting the BUSGNT signal) more than one CLK_20 period (50
nsec + EPLD-register set-up time) before the last -SD STROBE pulse.
Timing parameter T28 is a Micro Channel Architecture specification for the
slave adapter to de-assert -SDR0 -SDR1, and -MSDR signals within 40 nsec of the
bus-master adapter's de-assertion of the -S0, -S1 status signal. T29 is a
parameter common to all of the SDP cycles. This parameter refers to a Micro
Channel Architecture specification that states after the -SDR0 and -SDR1
signals are de-asserted, the slave must drive the -SDR0 and -SDR1 signal to a
high-impedance state within 40 nsec from the trailing edge of the -CMD strobe.
The timing parameter T31 specifies the minimum required pulse width for -TC,
the terminal-count signal that indicates the end of the SDP transfer, to be 60
nsec minimum. Table 1 gives device-specific timing information for the
bus-cycle timing diagrams illustrated in Fig 3, 4, and 5.
| Figure | Parameter | Explanation | Timing |
|---|
| Min | Typ | Max |
|---|
| 3 | T20 | -SD STROBE period | N/A | 100 | N/A |
| 3 | T21 | -SD STROBE active | 50 | N/A | N/A |
| 3 | T22 | -SD STROBE inactive | 50 | N/A | N/A |
| 3 | T23 | RDYRTN active to -SD STROBE falling edge (deferred cycle) | 78 | N/A | N/A |
| 3 | T24 | RDYRTN valid from -SD STROBE low for data pricing | 3 | N/A | 45 |
| 3 | T25 | RDYRTN inactive low setup to CLK_20 high | 9 | N/A | N/A |
| 3 | T26 | RDYRTN inactive low hold from CLK_20 high | 9 | N/A | N/A |
| 4 | T27 | -S0,1 inactive from last -SD STROBE falling edge | N/A | N/A | 10 |
| 4 | T28 | -SDR0,1 and -MSDR inactive from -S0,1 inactive | N/A | N/A | 40 |
| 3,4,5 | T29 | -SDR0,1 3-state from -CMD | N/A | N/A | 40 |
| 3,5 | T30 | -CMD inactive from last falling edge of -SD STROBE | 100 | N/A | N/A |
| 5 | T31 | -TC pulse width | 60 | N/A | N/A |
Table 1: Streaming Data-Transfer Cycles (N/A = Not Applicable)
You could implement this design in several different technologies. However,
using programmable logic offers you the ability to add other functions, remove
unnecessary features, or modify parts of the design to meet your design
needs.
Designer's Do's and Don'ts
The following design pointers highlight important information gleaned
from Micro Channel-related literature. They are summarized here for
your convenience.
- When a master gains control of the channel, it must initiate at least one
transfer cycle. If the master must abort the cycle, it activates -S0 and -S1
with the minimum pulse width of 85 nsec and does not activate -ADL and
-CMD.
- To exit the inactive state, the arbitration controller of the bus master
must sense -PREEMPT high after the trailing edge of the status line(s) goes
inactive.
- The system master can perform data transfers, and system logic can perform
refresh operations, while ARB/-GNT is in the ARB state. Selected slaves must
respond independently of the state of ARB-/GNT. A bus master must not run
cycles when ARB/-GNT is in the ARB State.
- Status-signal timing during streaming-data transfers is completely
different from nonstreaming-data transfers. So don't use status signals -S0 and
-S1 to hold CD CHRDY low.
- Because programmable-option-select (POS) register 2, bit 0 (card enable)
can be modified by the system, don't use it for device reset.
- If possible, don't use the FixedResources keyword in the adapter
description file. Contrary to the purpose of POS, the keyword indicates
resources that the adapter must have, such as hardwired INT or ARB levels.
- The byte-enable signals -SBHE and -BE0, -BE1, -BE2, and -BE3 are not
mutually exclusive. A 32-bit master talking to a 16-bit slave must drive the
byte-enable signals as well as -SBHE.
- POS's register space is I/O address space xxx0 to xxx7 (hex).
- The T79 timing parameter specifies the maximum time length for
streaming-data transfers. For a master-terminated cycle, the master must
de-assert -S0 and -S1, to indicate end of cycle, within 7.8 sec (max) from -CMD
active (start of cycle). Therefore, the master must signal termination of the
streaming-data transfer within 7.8 µsec from -CMD active. However, the
Notes section in the Micro Channel Architecture specification adds that if
-PREEMPT goes active, the master can continue to hold the channel for 7.8 sec
from -PREEMPT, indicating that basic transfer cycles may continue after
streaming-data transfers are complete.
- The Micro Channel bus doesn't provide pull-up resistors for the
streaming-data-related signals -SDR0, -SDR1, -MSDR, and -SD STROBE. Adapters
receiving these signals must provide a pullup resistor for each signal. The MCA
specification recommends a minimum of 20-kΩ. pullup to 5V dc.
References
- Micro Channel Adapter Handbook, April 1990, Altera Corp.
- 1991 Altera Data Book, Altera Corp.
- IBM Micro Channel Bus-Master Design-Seminar Notes, February 1990.
- Personal System/2 Hardware Interface Technical Reference, May 1988.
- IBM Micro Channel Architecture Supplement for the Personal System/2
Hardware Interface Technical Reference, November 1989.
- Heath, C., "Overview of Extended Micro Channel Functions," Personal Systems
(IBM Personal Systems Technical Journal), Issue 4, 1989.
- "Micro Channel Bus-Master Design Guidelines," Application Note 23, January
1991, Altera Corp.
- "Micro Channel Bus Master and SDP Logic with the EPM5032 EPLD," Application
Note 24, January 1991, Altera Corp.
Author's biography Vinita Singhal is an MPLD Design Manager at Altera
Corp who supervises the design group that transfers designs from EPLDs to
Mask-Programmed Logic Devices. She has a BTech with honors from the Indian
Institute of Technology and an MSEE from Pennsylvania State University. In her
spare time, Vinita enjoys reading, technical writing, and traveling.
|